Vision-Based Proprioceptive Sensing: Tip Position Estimation for a Soft Inflatable Bellow Actuator
Abstract
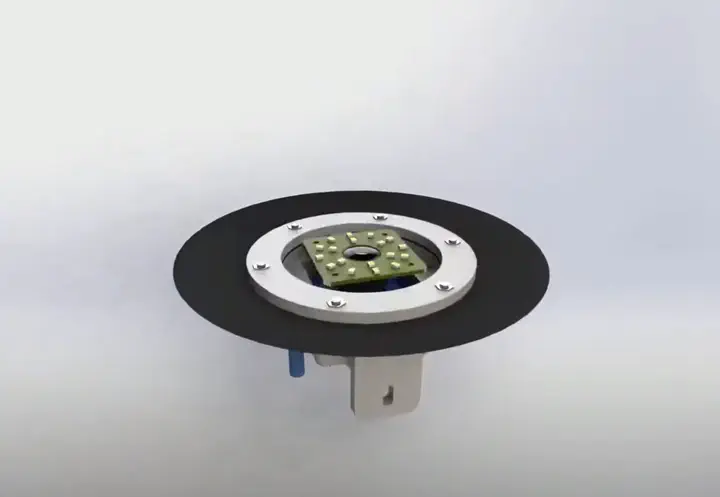
This paper presents a vision-based sensing approach for a soft linear actuator, which is equipped with an internal camera. The proposed vision-based sensing pipeline predicts the three-dimensional tip position of the actuator. To train and evaluate the algorithm, predictions are compared to ground truth data from an external motion capture system. An off-the-shelf distance sensor is integrated in a second actuator of the same type, providing only the vertical component of the tip position and used as a baseline for comparison. The camera-based sensing pipeline runs at 40 Hz in real-time on a standard laptop and is additionally used for closed loop elongation control of the actuator. It is shown that the approach can achieve comparable accuracy to the distance sensor for measuring the linear expansion of the actuator, but additionally provide the full three-dimensional tip position.