Peter Werner
Peter Werner
Home
Publications
CV
Light
Dark
Automatic
paper-conference
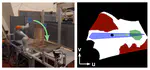
Superfast Configuration-Space Convex Set Computation on GPUs for Online Motion Planning
We leverage GPUs to create probabilistically collision-free convex sets in configuration space on-the-fly, enabling high-quality trajectory optimization without challenging collision avoidance constraints. Our approach runs 17× faster with 28% higher reliability than traditional methods, validated on both simulations and a KUKA robot with real-time perception.
[RSS, 2025]
Peter Werner
,
Richard Cheng
,
Tom Stewart
,
Russ Tedrake
,
Daniela Rus
PDF
Cite
Website
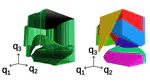
Faster Algorithms for Growing Collision-Free Convex Polytopes in Robot Configuration Space
We propose two new algorithms for constructing collision-free convex polytopes in robot configuration space. Our key insight is that finding near-by configuration-space obstacles using sampling is inexpensive and greatly accelerates region generation. Our two algorithms use such samples to either employ nonlinear programming more efficiently (IRIS-NP2 ) or circumvent it altogether using a massively-parallel zero-order optimization strategy (IRIS-ZO). We show that IRIS-ZO achieves an order-of-magnitude speed advantage over its predecessor IRIS-NP. IRISNP2, also significantly faster than IRIS-NP, builds larger polytopes using fewer hyperplanes, enabling faster downstream computation.
[ISRR, 2024]
Peter Werner
,
Thomas Cohn*
,
Rebecca H. Jiang*
,
Tim Seyde
,
Max Simchowitz
,
Russ Tedrake
,
Daniela Rus
PDF
Cite
Website
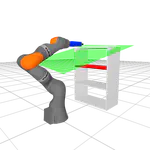
Approximating Robot Configuration Spaces with few Convex Sets using Clique Covers of Visibility Graphs
We propose an algorithmic appraoch to approximating robot configuration space with a small collection of convex sets. First, the algorithm constructs a visibility graph using sampling, then a small clique cover of the visibility graph is computed, and finally the cliques are inflated to full-dimensional polytopes that are collision free.
[ICRA, 2024]
Peter Werner
,
Alexandre Amice
,
Tobia Marcucci
,
Daniela Rus
,
Russ Tedrake
PDF
Cite
Code
Video
Website
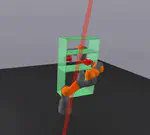
Certifying Bimanual RRT Motion Plans in a Second
We present an efficient method for certifying noncollision for piecewise-polynomial motion plans in algebraic reparametrizations of configuration space. Such motion plans include those generated by popular randomized methods including RRTs and PRMs, as well as those generated by many methods in trajectory optimization. Based on Sums-of-Squares optimization, our method provides exact, rigorous certificates of non-collision; it can never falsely claim that a motion plan containing collisions is collision-free.
[ICRA, 2024]
Alexandre Amice
,
Peter Werner
,
Russ Tedrake
PDF
Cite
Website
Dynamic Multi-Team Racing: Competitive Driving on 1/10-th Scale Vehicles via Learning in Simulation
Autonomous racing is a challenging task that requires vehicle handling at the dynamic limits of friction. While single-agent scenarios like Time Trials are solved competitively with classical model-based or model-free feedback control, multi-agent wheel-to-wheel racing poses several challenges including planning over unknown opponent intentions as well as negotiating interactions under dynamic constraints. In this work, we address these challenges via self-play reinforcement learning to enable zero-shot sim-to-real transfer of highly dynamic policies.
[CORL, 2023 +
Best Paper Award
ICRA Multi-Robot Learning Workshop, 2023]
Peter Werner
,
Tim Seyde
,
Paul Drews
,
Thomas Balch
,
Igor Gilitschenski
,
Wilko Schwarting
,
Guy Rosman
,
Sertac Karaman
,
Daniela Rus
PDF
Cite
Video
Website
Solving Continuous Control via Q-learning
We show that action discretization and value decomposition, enables us to scale and apply Q-learning to continuous control tasks. With bang-bang actions alone, the performance of this critic-only approach matches state-of-the-art continuous actor-critic methods when learning from features or pixels.
[ICLR, 2023]
Tim Seyde
,
Peter Werner
,
Igor Gilitschenski
,
Wilko Schwarting
,
Martin Riedmiller
,
Daniela Rus
,
Markus Wulfmeier
Cite
Code
Finding and Optimizing Certified, Collision-Free Regions in Configuration Space for Robot Manipulators
In this work, we find and certify collision-free polytopes in a rational parametrization of robot configuration space using convex optimization.
[
Best Paper Award
WAFR, 2022]
Alexandre Amice
,
Hongkai Dai
,
Peter Werner
,
Annan Zhang
,
Russ Tedrake
Cite
Website
Vision-Based Proprioceptive Sensing: Tip Position Estimation for a Soft Inflatable Bellow Actuator
Cameras enable integrated proprioceptive sensing of soft bellows actuators.
[IROS, 2020]
Peter Werner
,
Matthias Hofer
,
Carlo Sferrazza
,
Raffaello D'Andrea
Cite
Video
Cite
×